Budoucnost robotiky spatřila světlo světa. Prototyp je vyrobený 3D tiskem a rozložitelný
Měkcí roboti napodobující mořské živočichy byli v hledáčku vědecké komunity posledních několik let. Tým z Univerzity Johannese Keplera v Linci přišel se zařízením, které je založeno na želatině a v přírodě se po čase samo rozloží.
Ve studii publikované v časopise Science Robotics se tým vedený Andreasem Heidenem a Davidem Preningerem vypořádává s několika výzvami současné robotiky – požadavky na měkké povrchy a udržitelnost. První atribut se hodí pro práci s živými organismy, jejichž pohybové schopnosti se vývojáři snaží imitovat. Využití obnovitelných materiálů, které nebudou dále přispívat ke tvorbě odpadu, je v dnešní době téměř imperativem. Samotná rozložitelnost má ale i úskalí, s nimiž vědci musí pracovat. Patří mezi ně především rozpustnost ve vodě, problémy s tvarováním a omezená životnost.
Inženýrům z Univerzity Johannese Keplera se nepodařilo vyřešit všechny nástrahy vývoje měkkých a ekologických robotů, ale vytyčili směr dalšího výzkumu. Vyvarovali se konvenčních metod, kdy se měkcí roboti vylévají do forem. Výsledné tvary totiž nedokážou konkurovat přírodní komplexnosti, protože jsou omezeny geometricky i velikostně. Inovativním řešením byl vývoj vlastního výrobního procesu, který spočívá v 3D tisku pomocí hydrogelu založeného na želatině s příměsemi glycerolu a cukrového sirupu. Látka je zcela rozložitelná, má vhodnou roztažnost i laditelnost. Její termoreverzibilita navíc umožňuje opakované použití při tisku, a to až pětkrát po sobě.
Princip fungování robota
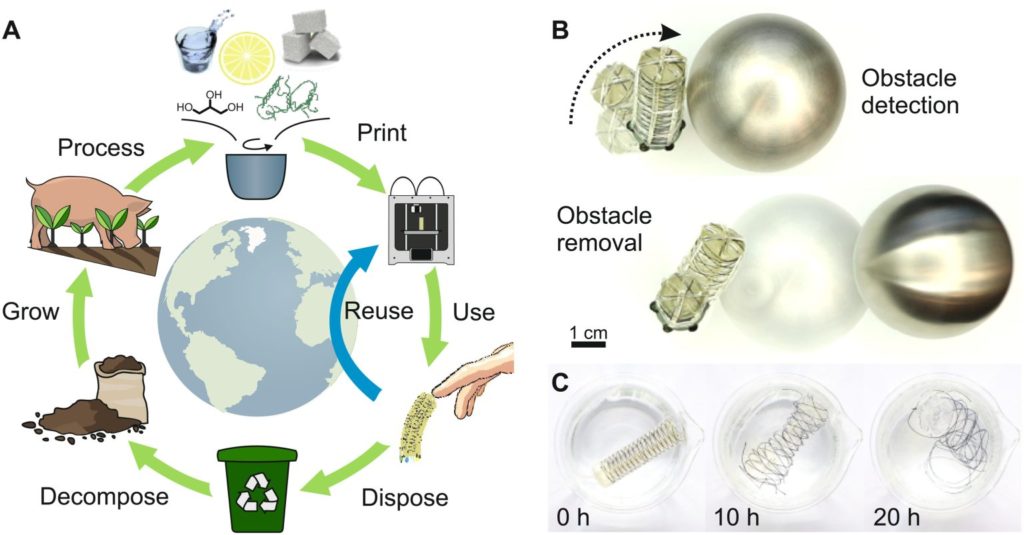
Samotný robot se skládá z měkkého těla a roztažných vlnovodných senzorů. Ty mu poskytují schopnost propriocepce, což je vnímání vlastního těla a jeho polohy, i exterocepce, tedy schopnost zpracovávat stimuly zvenku. Děje se tak díky napojení vlnovodů na LED diody a fotodiody. Pokud dojde ke kontaktu s cizím objektem, je senzor zmáčknut a prochází jím méně světla, což robot pozná a na dotyk zareaguje. Jeho mozkem je tříkomorový aktuátor, který je schopný reagovat na tlak nebo deformaci za méně jak vteřinu.
Měkký robot byl na základě svých vlastností vytrénován k odstraňování překážek, které mu stojí v cestě. Aktuátor rozpozná kontakt a uvolní tlak v komorách, díky kterým zařízení odstrčí předmět před sebou. Vědci však přiznávají, že je pro robota těžké rozpoznat od sebe obyčejný dotek a to, že se jej něco snaží ohnout. Řešením by mohlo být použití optických vláken fungujících na různých vlnových délkách nebo modulaci světla. Další výzvou je výroba sofistikovanějšího aktuátoru, při níž by byla využita kombinace biogelů reagujících na mechanické, elektrické a optické podněty.
Fenomén výroby robotů pomocí 3D tisku nabírá na síle díky širším možnostem designu. Na Harvardově univerzitě vyvinuli hejno měkkých robotických rybek, které dokážou plavat v komplexních tvarech díky systému LED diod a kamer. V čínském Tchien-ťinu zase pomocí 4D tisku vyrobili samohybného robota.